
research & development
Automatische panorama gimbal voor fotovliegeren
rein di, 07/23/2013 - 11:27
Omdat we niet elke keer onze vliegercamera naar beneden willen halen om de camera richting te veranderen hebben we een oplossing bedacht.
Deze bestaat uit 2 servo's een Arduino, een 5Volt battery en wat aluminium en klinknagels.
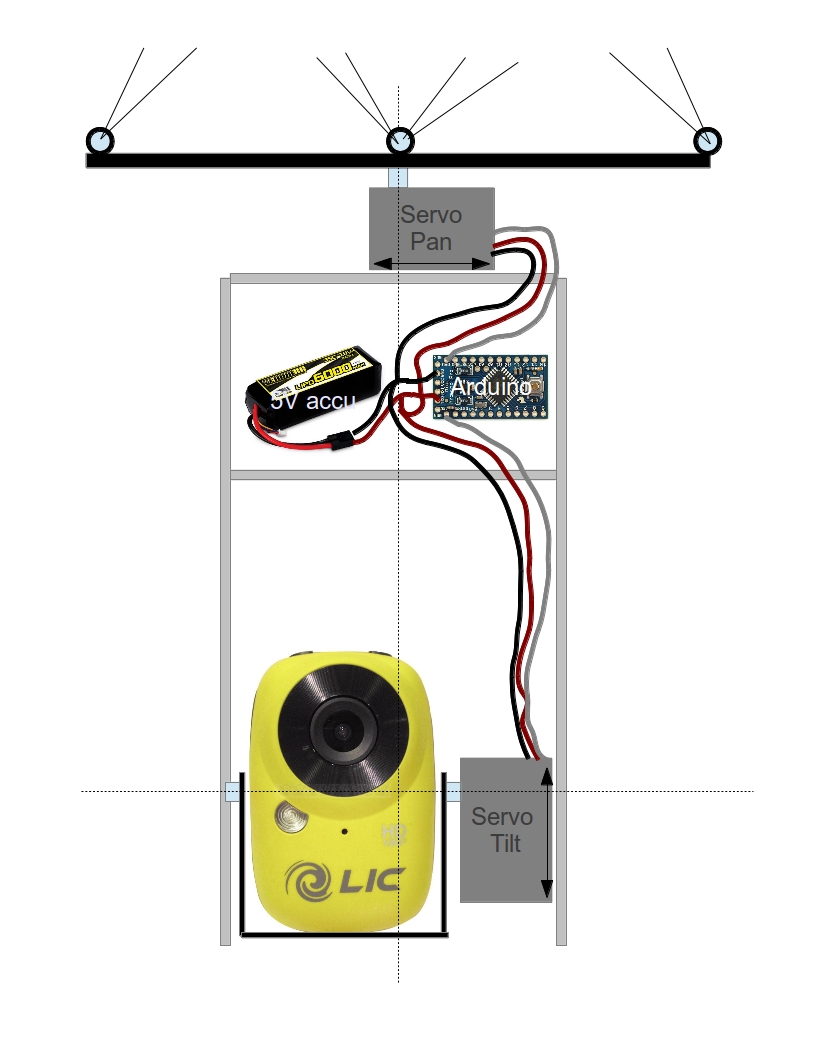
Het geheel hebben we alsvolgt in elkaar gezet (zie afbeelding)
Aansluitingen:
De battery levert 5 Volt. Deze is aagesloten op de Arduino. De battery is ook direct aangesloten op de 5V en de aarde van de servo's. De servo's halen hun voeding dus direct uit de battery en via de Arduino.
De data-pin van de servo's is aangesloten op pin 9 en 10 van de Arduino.
Code:
Met de onderstaande broncode moet je het geheel werkend kunnen krijgen. Je kunt deze code uploaden naar je Arduino microcontroller. Meer infomatie over Arduino kun je vinden op http://arduino.cc






| Bijlage | Grootte |
|---|---|
| 1.12 KB |