Deprecated function: session_set_save_handler(): Providing individual callbacks instead of an object implementing SessionHandlerInterface is deprecated in drupal_session_initialize() (line 245 of /var/www/blog.mechanicape.nl/includes/session.inc).
Omdat we niet elke keer onze vliegercamera naar beneden willen halen om de camera richting te veranderen hebben we een oplossing bedacht.
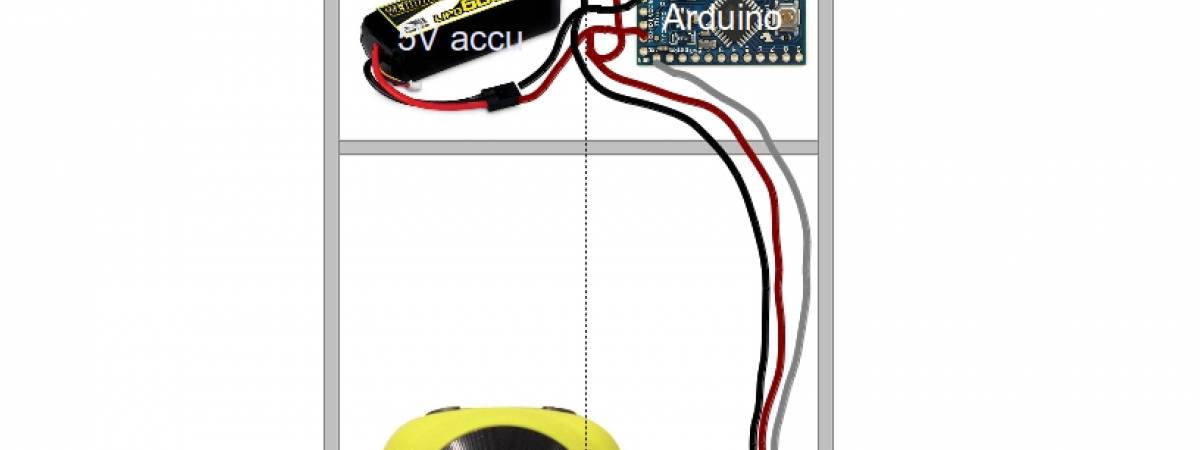
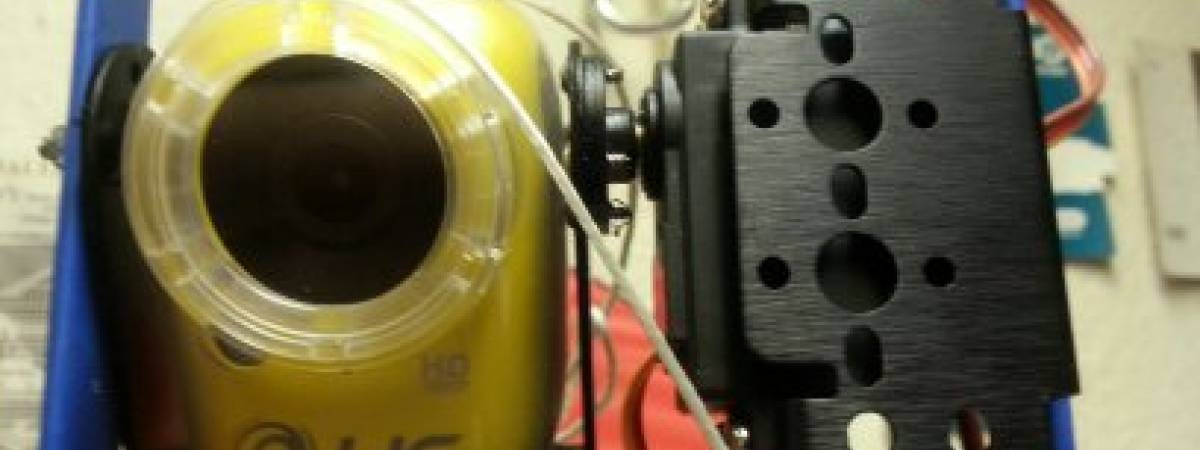
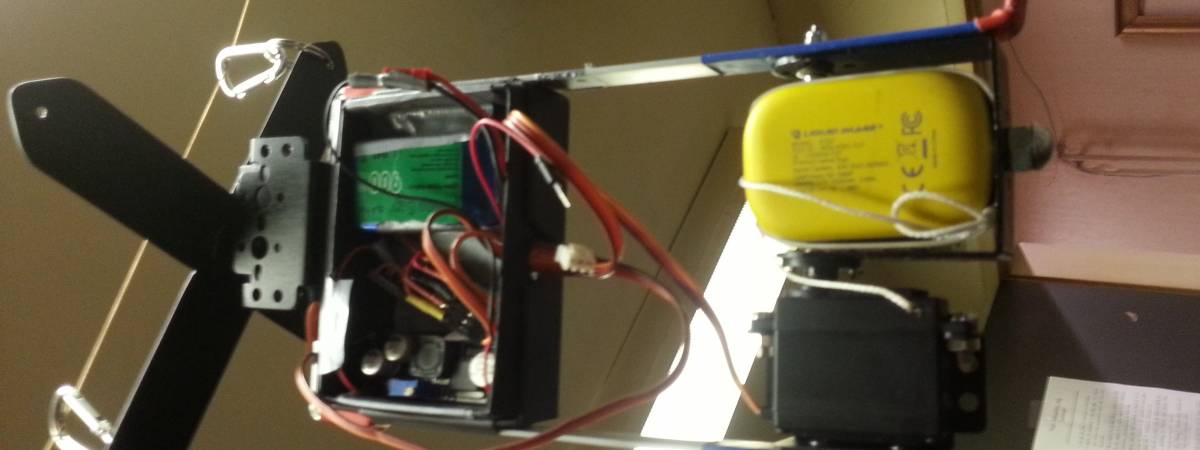
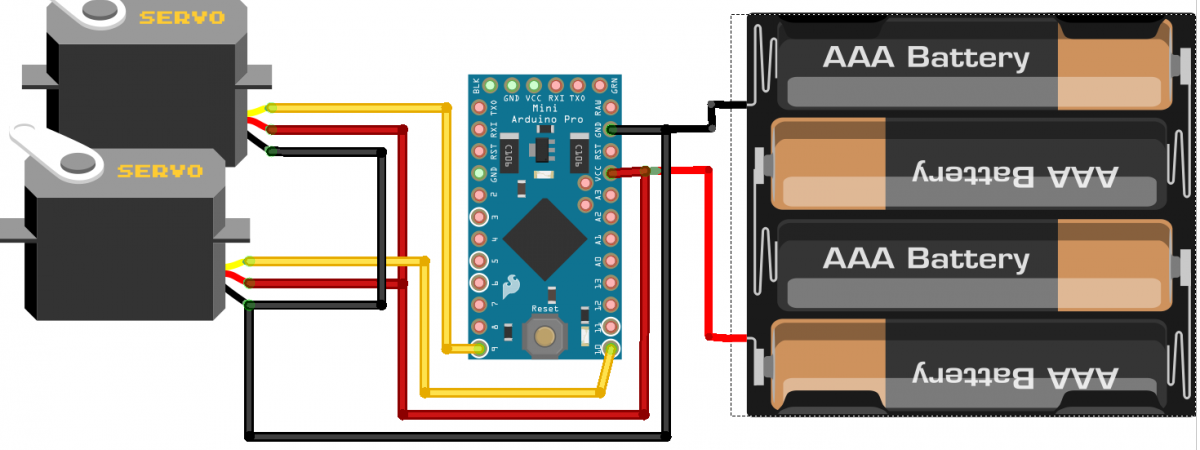
Deze bestaat uit 2 servo's een Arduino, een 5Volt battery en wat aluminium en klinknagels. Bij hebben er een gebouwd voor de Liquid Image Ego camera maar hetzelfde principe kun je ook toepassen op andere lichtgewicht camera's zoals bijvoorbeeld de GoPro Hero, Acme FlycamHD en vele anderen...
De Liquid Image Ego is een mini HD camera. De camera is door middel van een smartphone en een wifi verbinding te besturen en is daarom uitermate geschikt als camera om onder aan een één-lijns vlieger te hangen en vlieger-foto's te maken.
Tijdens de eerste testvlucht ( http://www.youtube.com/watch?v=1-ZD_jDRdi8 ) met een vlieger en de camera bleek dat de beeldkwaliteit van de camera goed is, maar het beeld was redelijk schokkerig.
Als oplossing voor dit probleem hebben we een picavet aan de cameramount gelijmd en ge-tie-wrapt.
De camera hangt onder aan de picavet, op zijn kop. De beelden moeten later dus allemaal softwarematig worden omgedraaid.
De onderstaande fotos zijn gemaakt door Levien Konter bij camping Coterlet, Palestinaweg 1 , Nijkerk
Vliegerfoto vanaf bungalowpark Aquaronde in Lemmer. Tijdens het vliegeren kwam er opeens een valwind waardoor de camera en vlieger zijn gecrashed. De camera is hierbij op het ijs gevallen. Gelukkig lag er ijs en is de camera niet verdronken in het water. Tijdens de reddingsoperatie is de camera doorgegaan met het maken van foto's. De reddingsoperatie staat dus ook volledig op de foto.